














 4-5 / 8
4-5 / 8

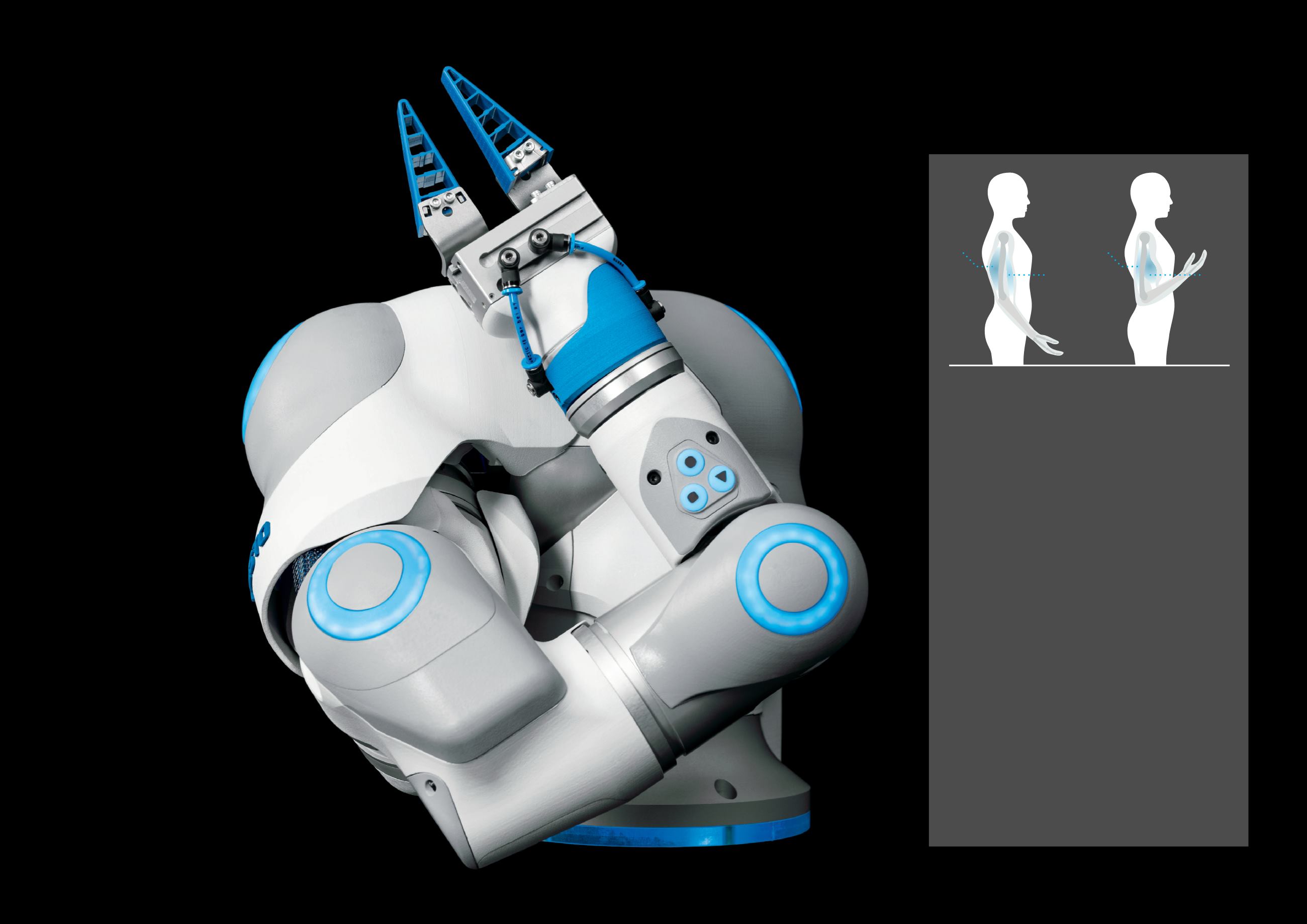
Agonist
Agonist
Antagonist
Antagonist
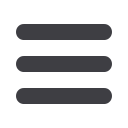
BionicCobot
Pneumatic lightweight robot with
human motion dynamics
The natural model
Whether it is gripping powerfully or lifting carefully, pressing firmly
or touching gently – for us humans to be able to execute a movement,
the interaction of counteracting muscles is always necessary. This
principle of agonist (player) and antagonist (opponent) also influences
our daily routine where we perhaps do not even suspect it: we solve
many tasks not with precision and accuracy, but do so with flexible and
supple movements. If, for example, we put our house key into the door
lock, the key finds its destination even without us looking closely at it.
If the door is opened from the inside, we automatically give way and
follow the movement with appropriate care.
The technical implementation
By applying the agonist-antagonist principle, the BionicCobot takes
advantage of the natural mechanism of biceps and triceps. The inter-
action of flexor and extensor takes place not only in the robot’s upper
arm, however, but in all seven joints. There are three axes in its shoul-
der area, one each in the elbow and lower arm plus two axes in the
wrist. In each axis there is a rotary vane with two air chambers. These
form a pair of drives, which can be infinitely adjusted like a mechanical
spring by filling them with compressed air.
The industrial benefit
The BionicCobot’s movements can thereby be controlled powerfully
and dynamically, but also sensitively and flexibly depending on
the situation. Even in the event of a collision, the system poses no
danger and does not have to be shielded from the worker like a
conventional factory robot. Based on this safe interaction, the natural
motion sequences and its intuitive operability, the BionicCobot has
great potential in a wide range of industries: especially when it comes
to monotonous or risky activities, it could be used as an assisting
robot and relieve humans.
4
5
BionicCobot: Sensitive helper for human-robot collaboration
Festo AG & Co. KG