














 2-3 / 8
2-3 / 8

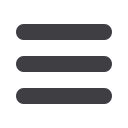
Zelle
Koexistenz
Synchronisiert
Kooperation
Kollaboration
© Fraunhofer IAO, Studie Leichtbauroboter in der manuellen Montage
BionicCobot
Pneumatischer Leichtbauroboter mit menschlicher Bewegungsdynamik
Ob kürzere Vorlaufzeiten, schnellere Produktlebenszyklen oder
eine hohe Flexibilität bezüglich Stückzahlen und Varianz – die
Anforderungen an die Produktion der Zukunft sind vielfältig und
verändern sich schneller als je zuvor. Dieser industrielle Wandel
verlangt ein neuartiges Zusammenspiel von Menschen, Maschinen
und Daten.
Eine entscheidende Rolle spielen bei dieser Entwicklung neben der
digitalen Vernetzung ganzer Anlagen vor allem roboterbasierte
Automatisierungslösungen, die Hand in Hand mit dem Menschen
zusammenarbeiten.
Kollaborative Arbeitsräume der Zukunft
Die strikte Trennung zwischen der manuellen Arbeit des Werkers
und den automatisierten Aktionen des Roboters wird zunehmend
aufgehoben. Ihre Arbeitsbereiche überlappen sich und verschmel-
zen zu einem kollaborativen Arbeitsraum. So können in Zukunft
Mensch und Maschine gleichzeitig dasselbe Werkstück oder Bau-
teil gemeinsam bearbeiten – ohne dass sie aus Sicherheitsgründen
voneinander abgeschirmt werden müssen.
Als Impulsgeber der Industrie-Automatisierung ist es die Kernkom-
petenz von Festo, die Produktions- und Arbeitswelten der Zukunft
mitzugestalten. Wesentlicher Bestandteil bei der Ideenfindung ist
das Bionic Learning Network. Im Verbund mit externen Partnern
sucht Festo nach natürlichen Phänomenen und Wirkprinzipien, die
sich auf die Technik übertragen lassen.
Paradigmenwechsel in der Robotik
Im Fokus der aktuellen Forschungsarbeiten stehen bionische
Leichtbauroboter, die aufgrund ihrer natürlichen Bewegungsmuster
und der eingesetzten Pneumatik geradezu prädestiniert sind für
kollaborative Arbeitsräume und in Zukunft eine preisgünstige
Alternative zu klassischen Roboterkonzepten darstellen können.
Die Stärken pneumatischer Antriebe liegen seit jeher in der einfa-
chen Handhabung und ihrer Robustheit, den geringen Anschaf-
fungskosten und ihrer hohen Leistungsdichte – also vergleichs-
weise großen Kräften bei kleinem Bauraum und geringem Gewicht.
Haltevorgänge kommen ohne weiteren Druckluftverbrauch aus
und sind damit äußerst energieeffizient.
Für den direkten Kontakt zwischen Mensch und Maschine bietet
die Pneumatik einen weiteren, entscheidenden Vorteil: ihre system-
eigene Nachgiebigkeit. Wird ein Aktor mit komprimierter Luft be-
füllt, lässt sich die erzeugte Bewegung in Geschwindigkeit, Kraft
und Steifigkeit exakt einstellen. Im Falle einer Kollision gibt das
System nach und stellt damit keine Gefahr für den Werker dar.
Um nun ganze Systeme in ihrer Dynamik beliebig einstellen zu
können, muss die eingesetzte Ventiltechnik die Luftflüsse und Drü-
cke äußerst präzise regeln können und dabei die komplexen Ver-
schaltungen von vielen Kanälen gleichzeitig gewährleisten.
Digitalisierung der Pneumatik
Was sich bislang nur aufwendig realisieren ließ, macht nun eine
Weltneuheit von Festo problemlos möglich: Das Festo Motion
Terminal ist die erste pneumatische Automatisierungsplattform,
die mit ihrer Softwaresteuerung per Apps die Funktionalitäten
von über 50 Einzelkomponenten in sich vereint. Die Digitalisierung
eröffnet der Pneumatik nun völlig neue Anwendungsgebiete, die
bisher der elektrischen Automatisierung vorbehalten waren.
Das Festo Motion Terminal kombiniert hochpräzise Mechanik,
Sensorik sowie komplexe Steuerungs- und Messtechnik auf
engstem Raum. Mit den internen Regelalgorithmen der Motion
Apps und den verbauten Piezoventilen lassen sich Durchflüsse und
Drücke exakt dosieren und auch in mehreren Kanälen gleichzeitig
beliebig variieren. Das ermöglicht sowohl kraftvolle und schnelle,
als auch weiche und feinfühlige Bewegungsabläufe.
Nachgiebiger Roboterarm mit sieben Freiheitsgraden
Mit dem BionicCobot hat Festo nun erstmals einen pneumatischen
Leichtbauroboter mit sieben Freiheitsgraden entwickelt, der auf-
grund dieser Nachgiebigkeit unmittelbar und sicher mit dem Men-
schen zusammenarbeiten kann.
In seiner Kinematik ist der Roboter dem menschlichen Arm nach-
empfunden. Wie sein biologisches Vorbild löst er viele seiner Auf-
gaben mit Hilfe seiner feinfühligen Bewegungen. Durch sein einzig-
artiges Antriebskonzept, das nach dem Agonisten-Antagonisten-
Prinzip arbeitet, lassen sich Bewegungsdynamik und Steifigkeit
dabei variabel einstellen.
01
01:
Kollaborativer Arbeitsraum:
gleich-
zeitige, gemeinsame Bearbeitung eines
Werkstücks von Mensch und Roboter
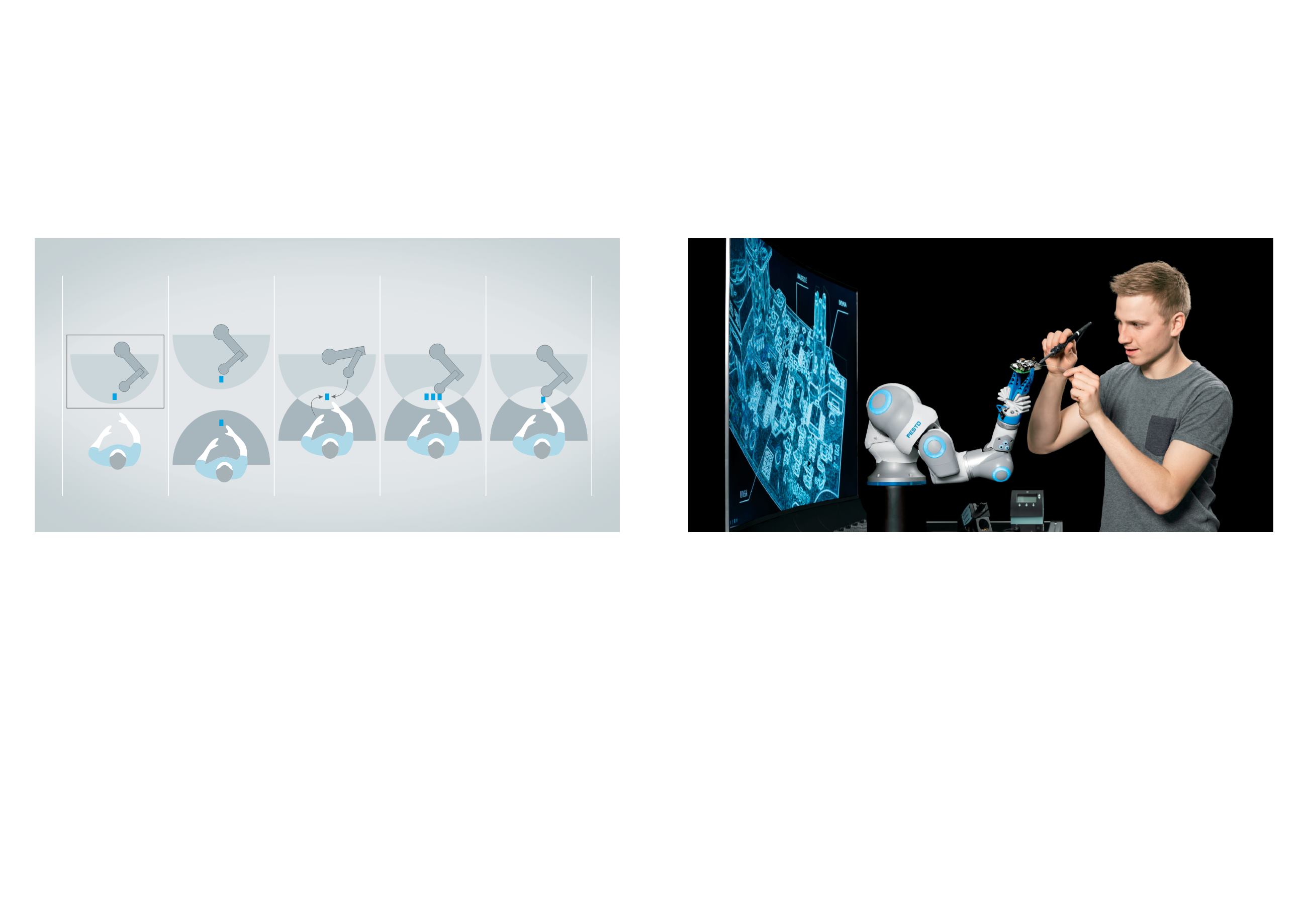
02:
Denkbares Zukunftsszenario:
der
BionicCobot als unterstützendes Assis-
tenzsystem in der Montage
02
2
Festo AG & Co. KG
3
BionicCobot: feinfühliger Helfer für die Mensch-Roboter-Kollaboration